
La struttura e il design di un veicolo elettrico puro sono diversi da quelli di un tradizionale veicolo con motore a combustione interna. È anche un'ingegneria di sistema complessa. È necessario integrare la tecnologia delle batterie, la tecnologia di azionamento del motore, la tecnologia automobilistica e la moderna teoria del controllo per ottenere un processo di controllo ottimale. Nel piano di sviluppo della scienza e della tecnologia dei veicoli elettrici, il Paese continua ad aderire al layout di ricerca e sviluppo di "tre verticali e tre orizzontali" e sottolinea ulteriormente la ricerca sulle tecnologie chiave comuni di "tre orizzontali" secondo la strategia di trasformazione tecnologica di "azionamento elettrico puro", ovvero la ricerca sul motore di azionamento e il suo sistema di controllo, sulla batteria di alimentazione e sul suo sistema di gestione, e sul sistema di controllo del gruppo propulsore. Ciascun grande produttore formula la propria strategia di sviluppo aziendale in base alla strategia di sviluppo nazionale.
L'autore seleziona le tecnologie chiave nel processo di sviluppo di un nuovo propulsore energetico, fornendo una base teorica e un riferimento per la progettazione, il test e la produzione del propulsore. Il piano è diviso in tre capitoli per analizzare le tecnologie chiave della trazione elettrica nel propulsore dei veicoli elettrici puri. Oggi introdurremo innanzitutto il principio e la classificazione delle tecnologie di azionamento elettrico.
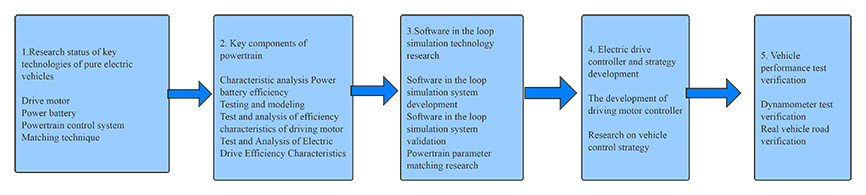
Figura 1 Collegamenti chiave nello sviluppo del gruppo propulsore
Allo stato attuale, le tecnologie chiave fondamentali del propulsore dei veicoli elettrici puri comprendono le seguenti quattro categorie:
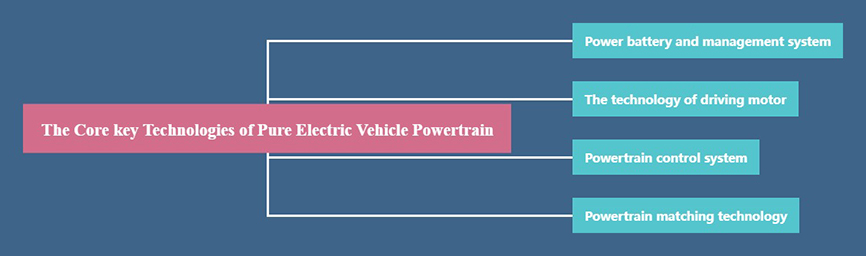
Figura 2 Le principali tecnologie chiave del propulsore
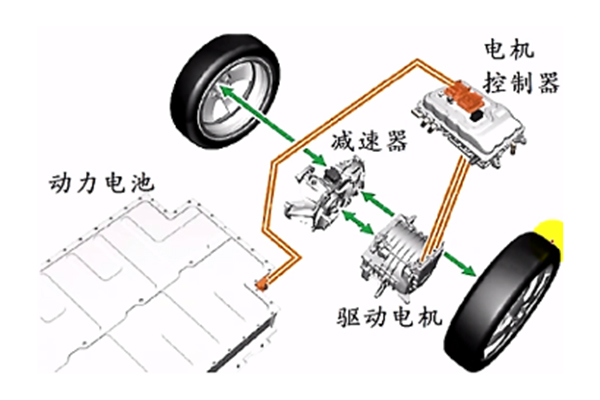
La definizione di sistema motorio di guida
In base allo stato della batteria del veicolo e ai requisiti di potenza del veicolo, converte l'energia elettrica prodotta dal dispositivo di generazione di energia di accumulo di energia di bordo in energia meccanica e l'energia viene trasmessa alle ruote motrici attraverso il dispositivo di trasmissione e le parti dell'energia meccanica del veicolo viene convertita in energia elettrica e reimmessa nel dispositivo di accumulo dell'energia quando il veicolo frena. Il sistema di guida elettrico comprende motore, meccanismo di trasmissione, controller del motore e altri componenti. La progettazione dei parametri tecnici del sistema di guida dell'energia elettrica comprende principalmente potenza, coppia, velocità, tensione, rapporto di trasmissione di riduzione, capacità di alimentazione, potenza di uscita, tensione, corrente, ecc.

1) Controllore del motore
Chiamato anche inverter, trasforma la corrente continua assorbita dal pacco batterie di alimentazione in corrente alternata. Componenti principali:
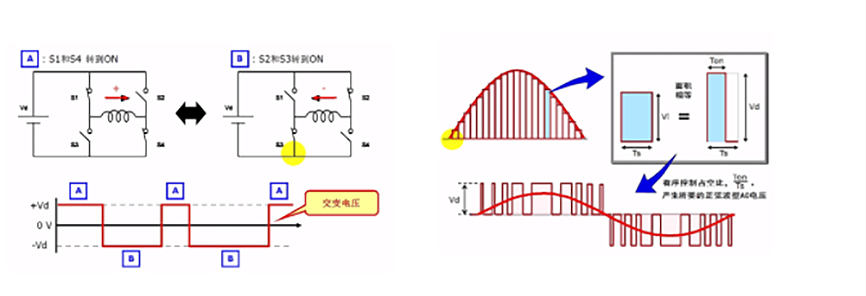
◎ IGBT: interruttore elettronico di potenza, principio: tramite il controller, controllare il braccio del ponte IGBT per chiudere una determinata frequenza e l'interruttore di sequenza per generare corrente alternata trifase. Controllando la chiusura dell'interruttore elettronico di potenza, è possibile convertire la tensione alternata. Quindi la tensione CA viene generata controllando il ciclo di lavoro.
◎ Capacità del film: funzione di filtraggio; sensore di corrente: rilevamento della corrente dell'avvolgimento trifase.
2) Circuito di controllo e pilotaggio: scheda di controllo del computer, pilotaggio IGBT
Il ruolo del controller del motore è convertire la corrente continua in corrente alternata, ricevere ciascun segnale e fornire la potenza e la coppia corrispondenti. Componenti principali: interruttore elettronico di potenza, condensatore a film, sensore di corrente, circuito di controllo per aprire diversi interruttori, formare correnti in diverse direzioni e generare tensione alternata. Pertanto, possiamo dividere la corrente alternata sinusoidale in rettangoli. L'area dei rettangoli viene convertita in una tensione con la stessa altezza. L'asse x realizza il controllo della lunghezza controllando il ciclo di lavoro e infine realizza la conversione equivalente dell'area. In questo modo, è possibile controllare l'alimentazione CC per chiudere il braccio del ponte IGBT a una determinata frequenza e commutare la sequenza attraverso il controller per generare alimentazione CA trifase.
Attualmente, i componenti chiave del circuito di azionamento dipendono dalle importazioni: condensatori, tubi di commutazione IGBT/MOSFET, DSP, chip elettronici e circuiti integrati, che possono essere prodotti in modo indipendente ma hanno capacità debole: circuiti speciali, sensori, connettori, che possono essere prodotti indipendentemente: alimentatori, diodi, induttori, circuiti stampati multistrato, cavi isolati, radiatori.
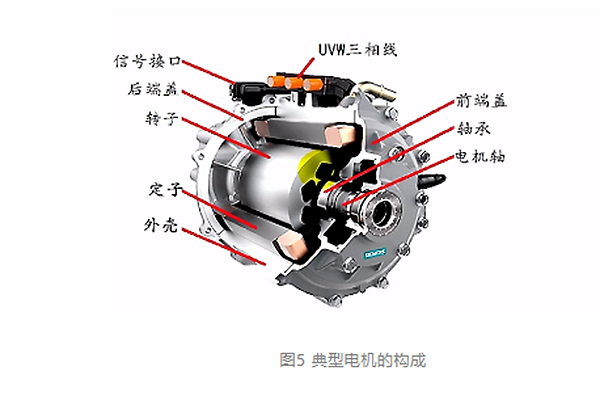
3) Motore: converte la corrente alternata trifase in macchinario
◎ Struttura: coperchi anteriori e posteriori, gusci, alberi e cuscinetti
◎ Circuito magnetico: nucleo dello statore, nucleo del rotore
◎ Circuito: avvolgimento dello statore, conduttore del rotore
4) Dispositivo trasmittente
Il cambio o riduttore trasforma la velocità di coppia erogata dal motore nella velocità e nella coppia richieste dall'intero veicolo.
Tipo di motore di azionamento
I motori di azionamento sono suddivisi nelle seguenti quattro categorie. Attualmente, i motori a induzione CA e i motori sincroni a magneti permanenti sono i tipi più comuni di veicoli elettrici a nuova energia. Quindi ci concentriamo sulla tecnologia del motore a induzione CA e del motore sincrono a magnete permanente.
| Motore CC | Motore a induzione CA | Motore sincrono a magneti permanenti | Motore a riluttanza commutata | |
| Vantaggio | Costo inferiore, requisiti bassi del sistema di controllo | Basso costo, Ampia copertura di potenza, Tecnologia di controllo sviluppata, Alta affidabilità | Alta densità di potenza, alta efficienza, dimensioni ridotte | Struttura semplice, requisiti bassi del sistema di controllo |
| Svantaggio | Elevati requisiti di manutenzione, bassa velocità, bassa coppia, breve durata | Piccola area efficiente, bassa densità di potenza | Costi elevati Scarsa adattabilità ambientale | Grande fluttuazione della coppia. Elevato rumore di funzionamento |
| Applicazione | Veicolo elettrico piccolo o mini a bassa velocità | Veicoli elettrici aziendali e autovetture | Veicoli elettrici aziendali e autovetture | Veicolo a propulsione mista |
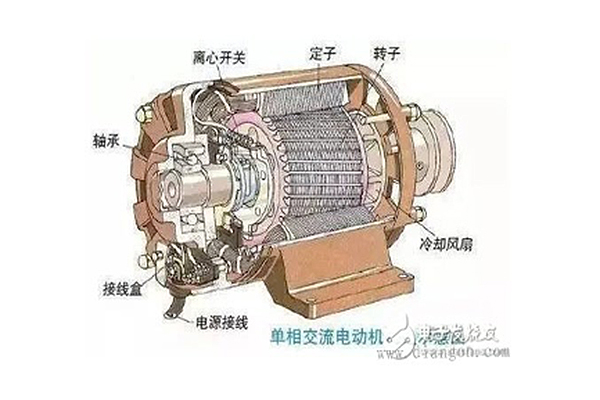 1) Motore asincrono a induzione CA
1) Motore asincrono a induzione CA
Il principio di funzionamento di un motore asincrono induttivo CA è che l'avvolgimento passa attraverso la fessura dello statore e il rotore: è impilato da sottili lamiere di acciaio ad elevata conduttività magnetica. L'elettricità trifase passerà attraverso l'avvolgimento. Secondo la legge dell'induzione elettromagnetica di Faraday, verrà generato un campo magnetico rotante, motivo per cui il rotore ruota. Le tre bobine dello statore sono collegate ad un intervallo di 120 gradi e il conduttore che trasporta corrente genera campi magnetici attorno ad esse. Quando l'alimentazione trifase viene applicata a questa disposizione speciale, i campi magnetici cambieranno in direzioni diverse con il cambiamento della corrente alternata in un momento specifico, generando un campo magnetico con intensità di rotazione uniforme. La velocità di rotazione del campo magnetico è chiamata velocità sincrona. Supponiamo che all'interno sia posto un conduttore chiuso, secondo la legge di Faraday, poiché il campo magnetico è variabile, la spira percepirà la forza elettromotrice, che genererà corrente nella spira. Questa situazione è proprio come il circuito percorso da corrente nel campo magnetico, che genera forza elettromagnetica sul circuito e Huan Jiang inizia a ruotare. Usando qualcosa di simile a una gabbia di scoiattolo, una corrente alternata trifase produrrà un campo magnetico rotante attraverso lo statore e la corrente verrà indotta nella barra della gabbia di scoiattolo cortocircuitata dall'anello terminale, quindi il rotore inizia a ruotare, il che è perché il motore è chiamato motore a induzione. Con l'aiuto dell'induzione elettromagnetica invece che direttamente collegato al rotore per indurre elettricità, nel rotore vengono riempite scaglie di nucleo di ferro isolante, in modo che il ferro di piccole dimensioni garantisca la minima perdita di correnti parassite.
2) Motore sincrono CA
Il rotore del motore sincrono è diverso da quello del motore asincrono. Il magnete permanente è installato sul rotore, che può essere suddiviso in tipo montato in superficie e tipo incorporato. Il rotore è realizzato in lamiera di acciaio al silicio e il magnete permanente è incorporato. Lo statore è inoltre collegato con una corrente alternata con una differenza di fase di 120, che controlla la dimensione e la fase della corrente alternata sinusoidale, in modo che il campo magnetico generato dallo statore sia opposto a quello generato dal rotore, e il campo magnetico il campo sta ruotando. In questo modo lo statore viene attratto da un magnete e ruota insieme al rotore. Ciclo dopo ciclo è generato dall'assorbimento dello statore e del rotore.
Conclusione: la motorizzazione dei veicoli elettrici è diventata sostanzialmente la corrente principale, ma non è unica ma diversificata. Ogni sistema di azionamento del motore ha il proprio indice completo. Ciascun sistema viene applicato all'azionamento dei veicoli elettrici esistenti. La maggior parte di essi sono motori asincroni e motori sincroni a magneti permanenti, mentre alcuni provano a commutare i motori a riluttanza. Vale la pena sottolineare che l'azionamento del motore integra la tecnologia dell'elettronica di potenza, la tecnologia microelettronica, la tecnologia digitale, la tecnologia di controllo automatico, la scienza dei materiali e altre discipline per riflettere l'applicazione completa e le prospettive di sviluppo di molteplici discipline. È un forte concorrente nei motori per veicoli elettrici. Per poter occupare un posto nei futuri veicoli elettrici, tutti i tipi di motori dovranno non solo ottimizzare la struttura del motore, ma anche esplorare costantemente gli aspetti intelligenti e digitali del sistema di controllo.
Orario di pubblicazione: 30 gennaio 2023


